Trajectory Optimisation
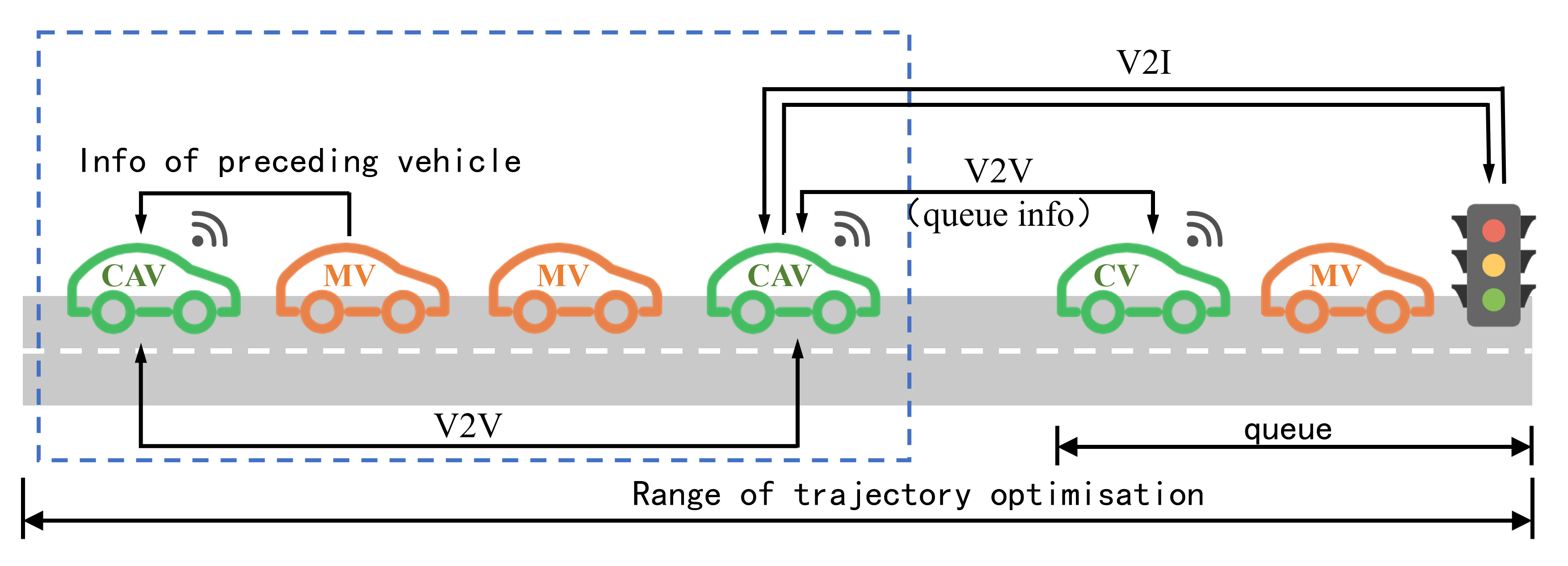
Our research is conducted in the context of the mixed traffic scene on the urban roads (mixed by connected vehicles (CV), autonomous vehicles (AV), manual vehicles (MV) and connected and autonomous vehicles (CAV)), and we explore how to utilize the information provided by the CV and CAV to realize the trajectory optimisation of the CAV and trajectory guidance of CV to achieve the purpose of alleviating traffic congestion and reducing energy consumption and emissions.
Key Capabilities: - Eco-driving - Multi-agent joint optimization - Traffic state estimation and prediction - Traffic control